|
|

|

|
| e-Pub |
Section: New Results
Uncertainty Modeling with Ontological Models and Probabilistic Logic Programming
Participants : Carlos F. Crispim-Junior, François Brémond.
keywords: probabilistic logic programming, activities of daily living, senior monitoring, ontological models,
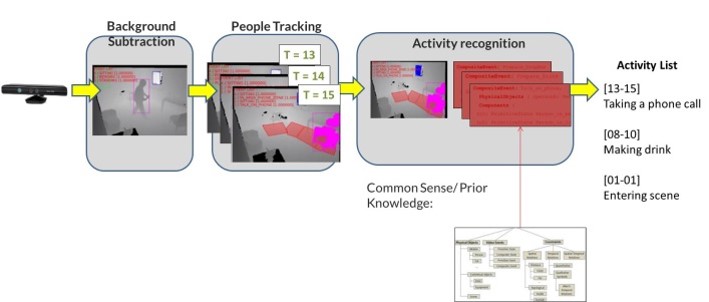
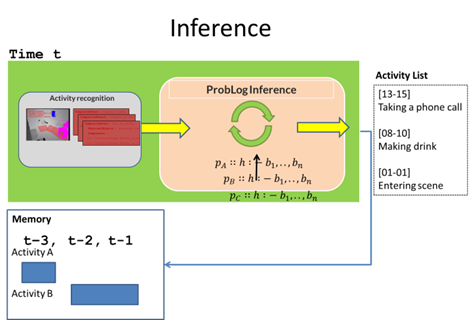
We have been investigating novel probabilistic, knowledge-driven formalisms that can join the representation expressiveness of an ontology-based language with the probabilistic reasoning of probabilistic graphical models, like probabilistic graphical models and probabilistic programming languages. The goal is to support the representation of events (entities, sub-events and constraints) and hierarchical structures (event, sub-events) and at the same time be capable of handling uncertainty related to both entity/sub-event detection and soft constraints. Prior work in probabilistic logic provides support to reasoning either about uncertainty related to entity recognition (probability of entity x in the scene defined in ProbLog2) or to soft-constraint (relevance of violation of constraint to model as defined in Markov Logic). In our current work in partnership with KU university of Leuven, we have extended the ontological models of our vision pipeline (Fig.17) with probabilistic logic formalism proposed by ProbLog (Fig.18), a probabilistic logic programming language. Current results on the recognition of daily activities of seniors are promising as they improved the precision of our prior method by 1%. Further work will focus on extending our uncertainty models to be robust to constraint violations.
|